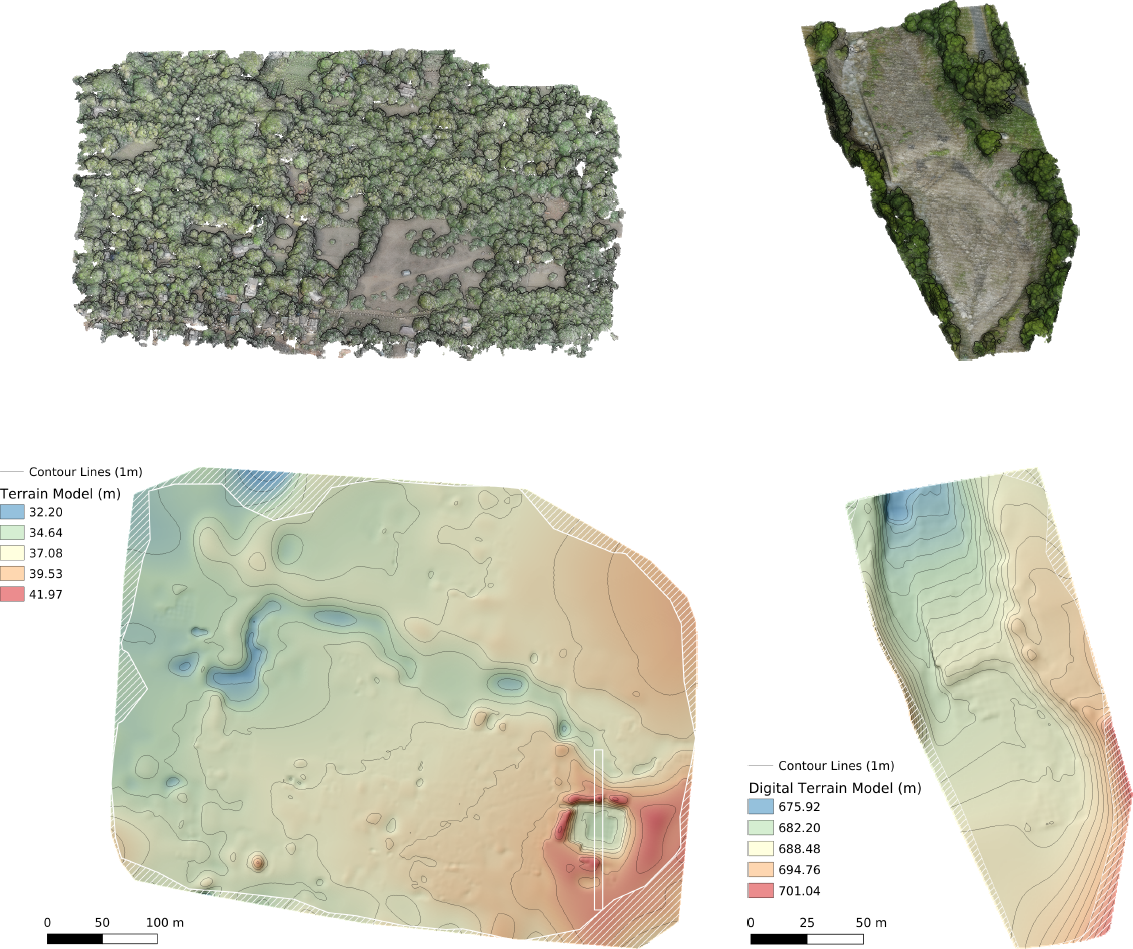
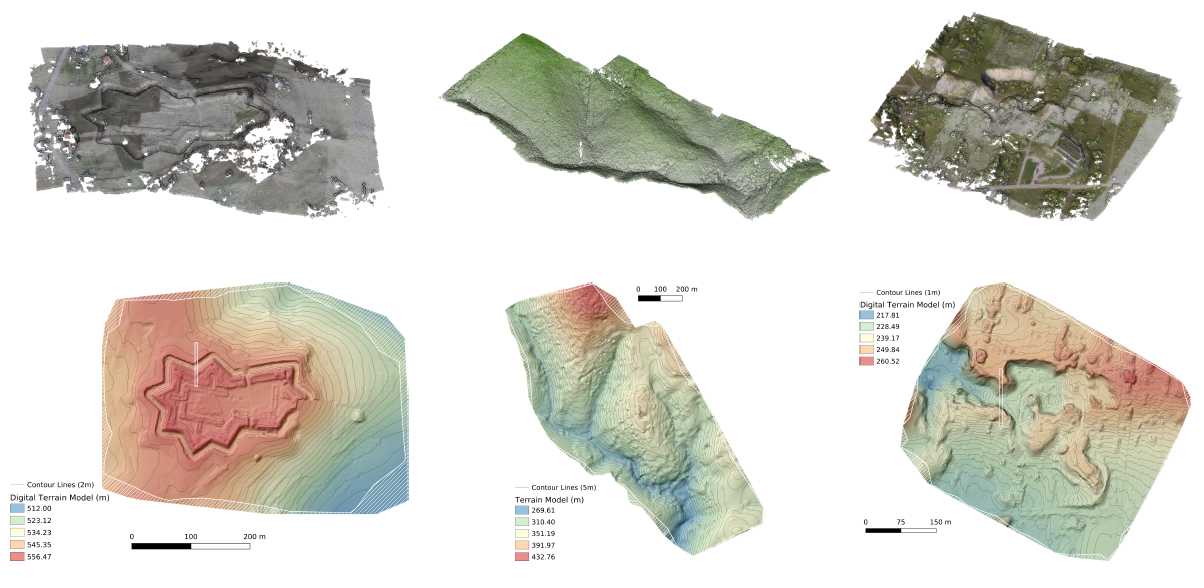
This paper presents a method designed to finely approximate ground surfaces from UAV photogrammetric point clouds by relying on statistical filters to separate vegetation from potential ground points, dividing the whole plot in similar complexity sub-plots through an optimized tilling, and filling holes by blending multiple local approximations through the partition of unity principle. Experiments on very different terrain topology show that our approach leads to significant improvement over the state-of-the-art method.
Papers
- Jules Morel, Alexandra Bac, Takashi Kanai: “Digital Terrain Model From UAV Photogrammetric Data”, STAG 2020: Smart Tools and Applications in Graphics, pp.77-87, 2020.
[Paper (author’s version)][Paper (publisher’s version)]