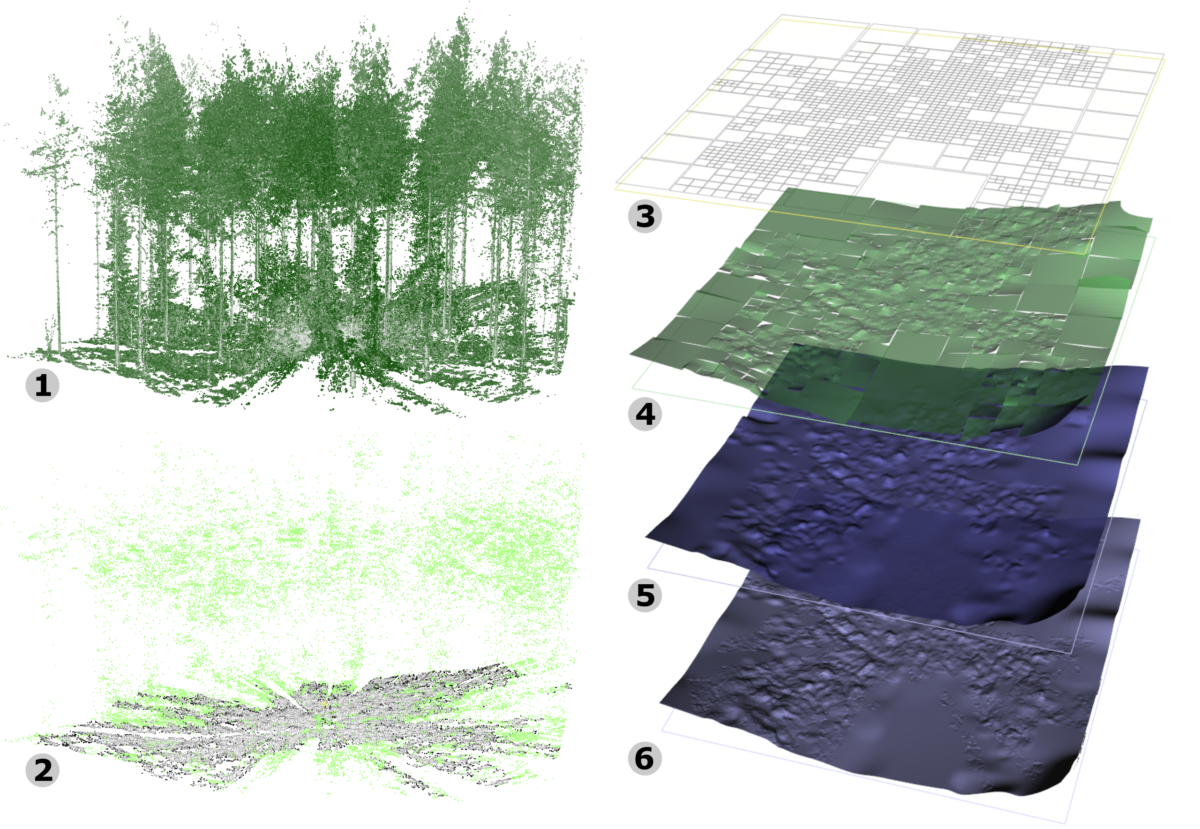
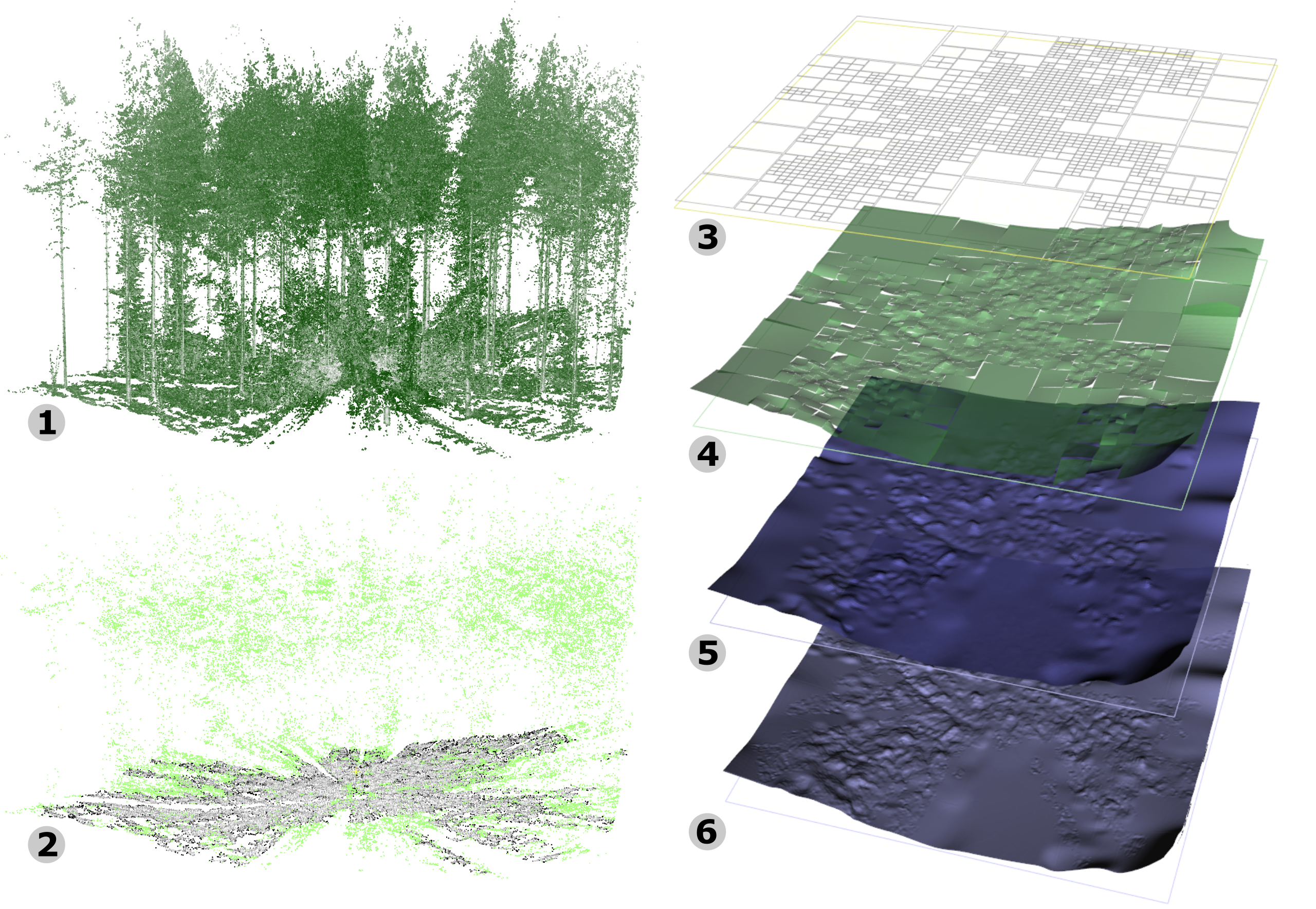
Few previous works have studied the modeling of forest ground surfaces from LiDAR point clouds using implicit functions. Jules et al.’s work [Jules17] is a pioneer in this area. However, by design this approach proposes over-smoothed surfaces, in particular in highly occluded areas, limiting its ability to reconstruct fine-grained terrain surfaces. This paper presents a method designed to finely approximate ground surfaces by relying on deep learning to separate vegetation from potential ground points, filling holes by blending multiple local approximations through the partition of unity principle, then improving the accuracy of the reconstructed surfaces by pushing the surface towards the data points through an iterative convection model.
Papers
- Jules Morel, Alexandra Bac, Takashi Kanai: “High Accuracy Terrain Reconstruction from Point Clouds Using Implicit Deformable Model”, Lecture Notes in Computer Science 12142 (Proc. ICCS 2020 Part IV), pp.251-265, Springer Nature Switzerland AG, 2020.
[Paper (author’s version)][Paper (publisher’s version)][Code (github)]