
There is a crucial demand in the computer animation industry to make animations that blend animator-specified expressive motion with physics-based realism. We propose a novel framework to create directable animation of elastically deformable objects. The directable animation is created with animator-specified keyframes and the motion trajectory of the deformable object, while maintaining a plausible realism. Our framework mainly consists of two complementary approaches. The first is a method to control the time-varying geometry of an elastic object, using a loose key-framing technique. In our keyframing, we introduce an FEM-based elastic deformation algorithm that allows us to rearrange the elastic object motion, guided by the shape or pose specified at each keyframe. The second is a motion compensation technique, which allows us to rearrange the physical behavior of elastically deformable objects under a user-specified trajectory. The animation examples demonstrate that our framework provides plausibly realistic deformation animations with greater controllability and usability than existing approaches.
Papers
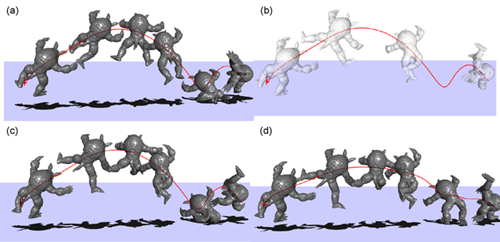
- Ryo Kondo, Takashi Kanai, Ken-ichi Anjyo: “Directable Animation of Elastic Objects”, Proc. ACM SIGGRAPH/Eurographics Symposium on Computer Animation 2005 (Los Angeles, CA, U.S.A., 29-31 July 2005), pp.127-134, 2005. [paper (Adobe PDF) (3.5MB)]
Demonstrations
- For SCA’05[wmv (31.0MB)]
Related Projects
- Digital Animation Laboratory (JST, CREST)